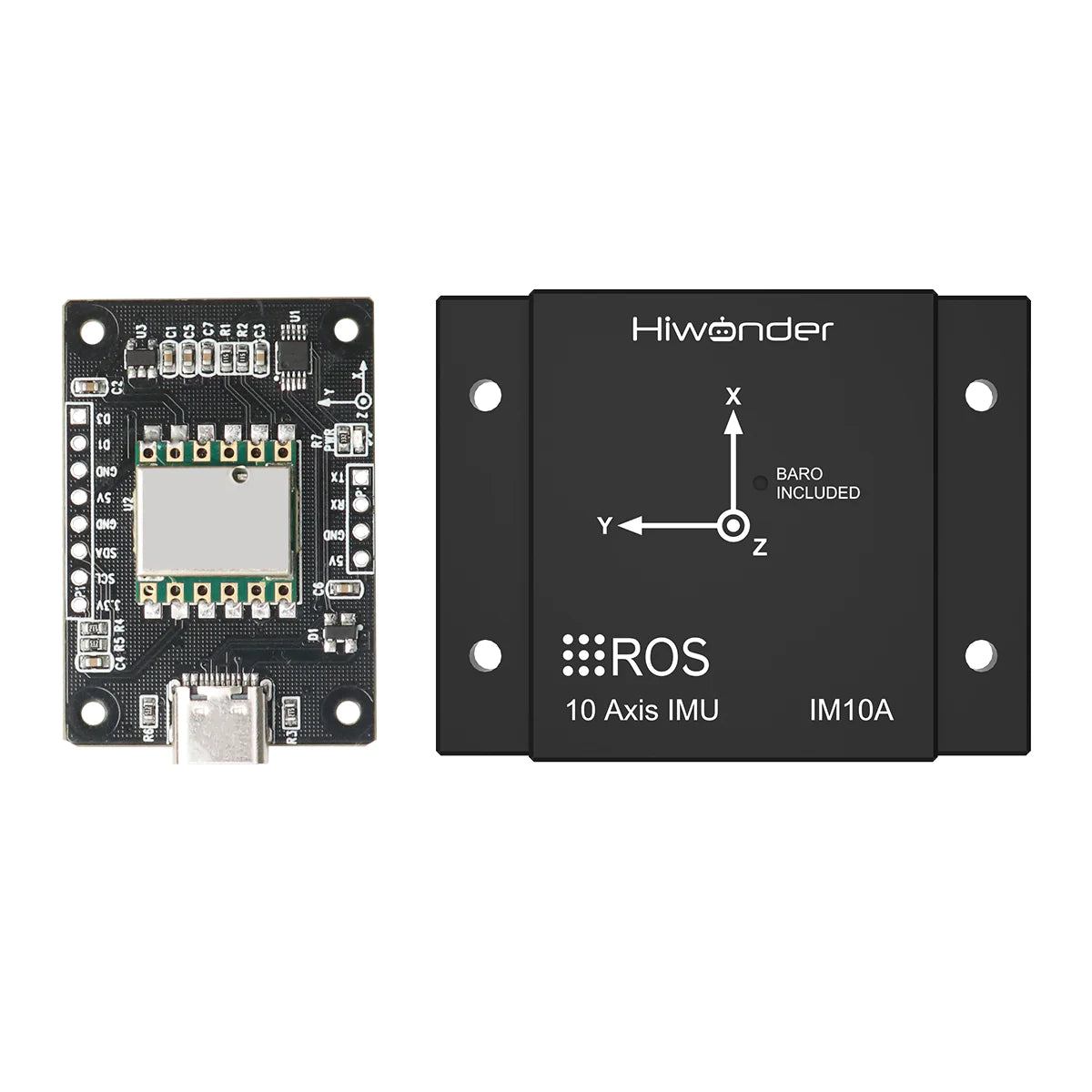


The IM10A inertial navigation module is an advanced three-dimensional motion and posture measurement system utilizing MEMS technology. It comprises a three-axis gyroscope, a three-axis accelerometer, a three-axis magnetometer, and a barometer. With an integrated posture dynamics core algorithm engine and a sophisticated Kalman filter fusion algorithm, the IM10A delivers highly accurate, dynamic, and real-time compensated three-axis posture angle data.
The module supports real-time data transmission at an update rate of up to 200Hz and is compatible with GNSS data for fused positioning. We provide users with PC software, operational instructions, development manuals, and necessary development codes, streamlining the research and development process for users with diverse requirements.
Features
- Stable angle output, yaw angle: 0.5″RMS, posture: 0.1*RMS
- Gyroscope automatic calibration technology
- Gyroscope bias, acceleration calibration, magnetometer calibration
- Integrated posture solver
- Serial port TTL, I2C communication port
- 360° Stable and continuous angle output
- Built-in barometer for altitude measurement
- Receive serial GPS data in accordance with the NMEA-0183 standard to establish a GPS-IMU navigation integration unit
| AVAILABILITY |
5 in stock |
|---|---|
| Main Category |
Position Imaging Sensors |
| Sub Category |
Inertial Measurement System |
| Mini Category |
None |
| SKU |
gr00031 |